STANDARD AMRS – Automobilní základny AMB-300XS

Hlavní kategorie
AGV AMR / zvedací zařízení AGV AMR / automaticky naváděné vozidlo AGV / autonomní mobilní robot AMR / vůz AGV AMR pro průmyslovou manipulaci s materiálem / čínský výrobce robot AGV / skladový AMR / zvedací zařízení AMR s laserovou navigací SLAM / mobilní robot AGV AMR / podvozek AGV AMR s laserovou navigací SLAM / inteligentní logistický robot
Aplikace

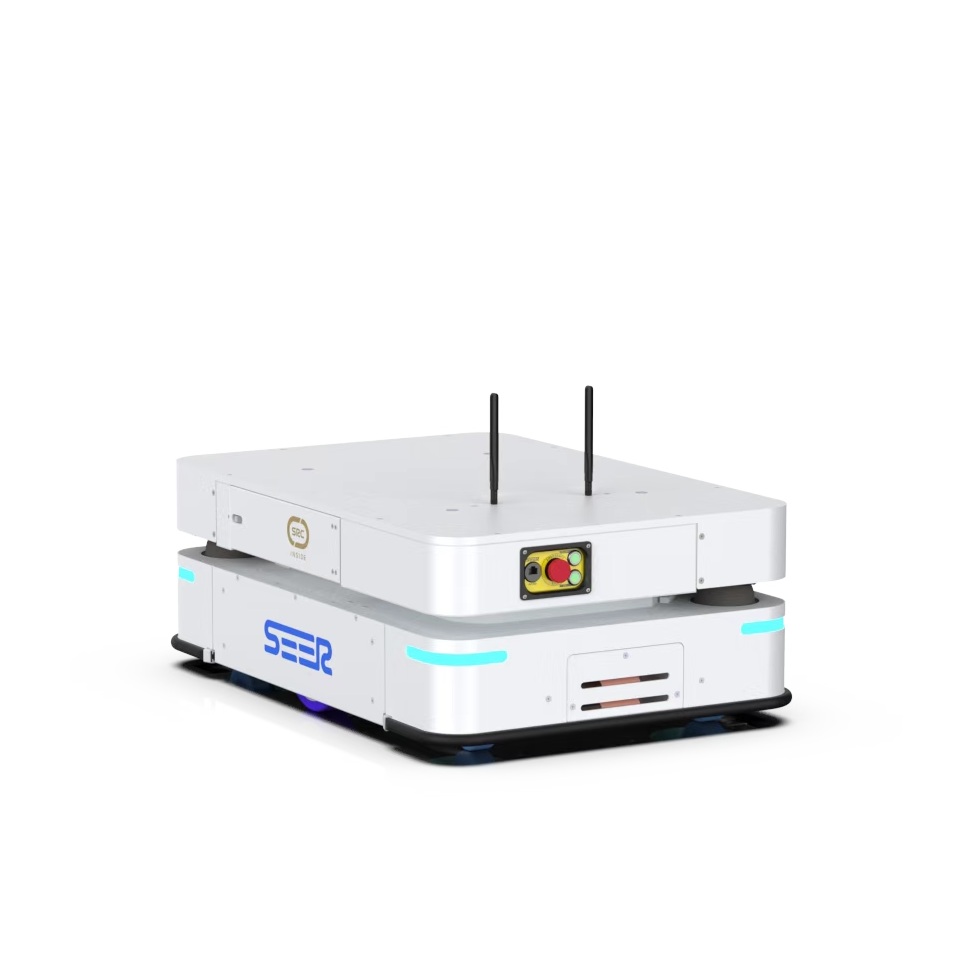
Bezpilotní podvozek řady AMB (Auto Mobile Base) pro autonomní vozidla AGV, univerzální podvozek určený pro autonomně řízená vozidla AGV, nabízí některé funkce, jako je úprava map a lokalizační navigace. Tento bezpilotní podvozek pro vozík AGV nabízí bohatá rozhraní, jako jsou I/O a CAN, pro montáž různých horních modulů spolu s výkonným klientským softwarem a dispečerskými systémy, které uživatelům pomáhají rychle dokončit výrobu a aplikaci autonomních vozidel AGV. Na horní straně bezpilotního podvozku řady AMB pro autonomně řízená vozidla AGV jsou čtyři montážní otvory, které podporují libovolné rozšíření pomocí zvedáků, válečků, manipulátorů, latentní trakce, displeje atd. pro dosažení více aplikací jednoho podvozku. AMB společně se SEER Enterprise Enhanced Digitalization dokáže realizovat jednotnou dispečink a nasazení stovek produktů AMB současně, což výrazně zlepšuje inteligentní úroveň interní logistiky a dopravy v továrně.
Funkce

· Jmenovité zatížení: 300 kg
· Doba trvání: 12 hodin
· Číslo lidaru: 2
· Průměr otáčení: 972,6 mm
· Rychlost navigace: ≤1,5 m/s
· Přesnost polohování: ±5,0,5 mm
● Certifikace CE pro bezpečnost, vynikající výkon a vynikající bezpečnostní standardy již od návrhu
Certifikace CE (ISO 3691-4:2020) poskytuje nejvyšší úroveň kvality a bezpečnosti, což podporuje export.
I/O, CAN, RS485 a další rozhraní jsou vyhrazena pro rozšíření mechanismu vyšší úrovně, který umožňuje realizovat různé robotické aplikace.
● Přesné polohování ±5 mm
Přesnost navigační polohy ±5 mm a rychlost navigace 1,5 m/s pomáhají podnikům pracovat efektivně.
● Celkové funkce a bezproblémové rozšíření
Mezi základní funkce patří úprava mapy, úprava modelu, určování polohy a navigace, základní model pohybu (diferenciál), periferní rozšíření (kladky, zvedáky, latentní trakce), rozhraní atd.
● Čistota třídy 4, vyšší spolehlivost
Prošel testem čistoty ISO CLASS4, lze jej přímo použít v odvětvích s vysokými nároky na čistotu, jako je polovodičový průmysl.
● 3D detekce překážek, bezpečnější
Pro další zvýšení bezpečnosti produktu je podporována 3D detekce překážek a navigace pomocí reflektorů.



Parametr specifikace
| Model produktu | AMB-150 / AMB-150-D | AMB-300 / AMB-300-D | AMB-300XS | |
| Základní parametry | Navigační metoda | Laserový SLAM | Laserový SLAM | Laserový SLAM |
| Režim jízdy | Dvoukolový diferenciál | Dvoukolový diferenciál | Dvoukolový diferenciál | |
| Barva skořápky | Perlově bílá / Perlově černá | Perlově bílá / Perlově černá | RAL9003 | |
| D*Š*V (mm) | 800*560*200 | 1000*700*200 | 842*582*300 | |
| Průměr otáčení (mm) | 840 | 1040 | 972,6 | |
| Hmotnost (s baterií) (kg) | 66 | 144 | 120 | |
| Nosnost (kg) | 150 | 300 | 300 | |
| Minimální průchodná šířka (mm) | 700 | 840 | 722 | |
| Výkonnostní parametry | ||||
| Přesnost navigační polohy (mm*) | ±5 | ±5 | ±5 | |
| Přesnost úhlu navigace (°) | ±0,5 | ±0,5 | ±0,5 | |
| Rychlost navigace (m/s) | ≤1,4 | ≤1,4 | ≤1,5 | |
| Parametry baterie | Specifikace baterie (V/Ah) | 48/35 (Ternární lithium) | 48/52 (Ternární lithium) | 48/40 (Ternární lithium) |
| Komplexní výdrž baterie (h) | 12 | 12 | 12 | |
| Doba nabíjení (10–80 %) (10–80 %) (h) | ≤2 | ≤ 2,5 | ≤ 2,5 | |
| Způsob nabíjení | Manuální/Automatický/Spínací | Manuální/Automatický/Spínací | Manuální/Automatický/Spínací | |
| Rozšířená rozhraní | Výkon DO | Sedmicestný (celková zatížitelnost 24 V/2 A) | Sedmicestný (celková zatížitelnost 24 V/2 A) | Trojcestný (celková zatížitelnost 24 V/2 A) |
| DI | Deseticestný (NPN) | Deseticestný (NPN) | Jedenácticestný (PNP/NPN) | |
| Rozhraní nouzového zastavení | Obousměrný výstup | Obousměrný výstup | Obousměrný výstup | |
| Drátová síť | Třícestný gigabitový ethernet RJ45 | Třícestný gigabitový ethernet RJ45 | Obousměrný gigabitový ethernet M12 X-Code | |
| Konfigurace | Číslo lidaru | 1 nebo 2 | 1 nebo 2 | 2 (SICK nanoScan3) |
| Displej HMI | ● | ● | - | |
| Tlačítko nouzového zastavení | ● | ● | ● | |
| Bzučák | ● | ● | - | |
| Reproduktor | ● | ● | ● | |
| Okolní světlo | ● | ● | ● | |
| Nárazníkový pás | - | - | ● | |
| Funkce | Wi-Fi roaming | ● | ● | ● |
| Automatické nabíjení | ● | ● | ● | |
| Rozpoznávání police | ● | ● | ● | |
| Navigace laserovým reflektorem | 〇 | 〇 | 〇 | |
| 3D vyhýbání se překážkám | 〇 | 〇 | 〇 | |
| Certifikace | ISO 3691-4 | - | - | ● |
| Elektromagnetická kompatibilita/elektrostatický výboj | ● | ● | ● | |
| UN38.3 | ● | ● | ● | |
| Čistota | - | Třída ISO 4 | Třída ISO 4 | |
* Přesnost navigace se obvykle vztahuje k opakovatelné přesnosti, s jakou robot naviguje ke stanici.
● Standardní 〇 Volitelné Žádné
Naše podnikání







